115563
论文已发表
注册即可获取德孚的最新动态
IF 收录期刊
- 3.6 Breast Cancer (Dove Med Press)
- 4.3 Clin Epidemiol
- 2.6 Cancer Manag Res
- 3.2 Infect Drug Resist
- 4.1 Clin Interv Aging
- 6.1 Drug Des Dev Ther
- 4.1 Int J Chronic Obstr
- 8.7 Int J Nanomed
- 2.5 Int J Women's Health
- 3.2 Neuropsych Dis Treat
- 2.4 OncoTargets Ther
- 2.6 Patient Prefer Adher
- 2.6 Ther Clin Risk Manag
- 3.1 J Pain Res
- 3.5 Diabet Metab Synd Ob
- 4.5 Psychol Res Behav Ma
- 3.4 Nat Sci Sleep
- 2.4 Pharmgenomics Pers Med
- 2.6 Risk Manag Healthc Policy
- 4.6 J Inflamm Res
- 2.3 Int J Gen Med
- 3.9 J Hepatocell Carcinoma
- 3.3 J Asthma Allergy
- 2.5 Clin Cosmet Investig Dermatol
- 3.0 J Multidiscip Healthc

已发表论文
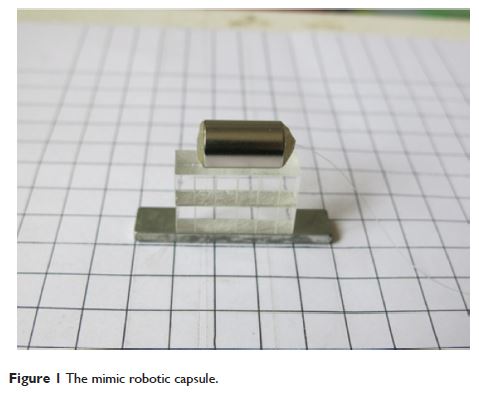
基于混合策略,对使用轴向磁化永磁环的机器人胶囊进行定位
Authors Yang W, Li Y, Qin F
Published Date February 2015 Volume 2015:8 Pages 141—151
DOI http://dx.doi.org/10.2147/MDER.S73639
Received 2 September 2014, Accepted 16 December 2014, Published 16 February 2015
Abstract: To actively maneuver a robotic capsule for interactive diagnosis in the
gastrointestinal tract, visualizing accurate position and orientation of the
capsule when it moves in the gastrointestinal tract is essential. A possible
method that encloses the circuits, batteries, imaging device, etc into the
capsule looped by an axially magnetized permanent-magnet ring is proposed.
Based on expression of the axially magnetized permanent-magnet ring's magnetic
fields, a localization and orientation model was established. An improved
hybrid strategy that combines the advantages of particle-swarm optimization,
clone algorithm, and the Levenberg–Marquardt algorithm was found to solve the
model. Experiments showed that the hybrid strategy has good accuracy,
convergence, and real time performance.
Keywords: localization, permanent-magnet ring, robotic capsule, hybrid strategy
Keywords: localization, permanent-magnet ring, robotic capsule, hybrid strategy